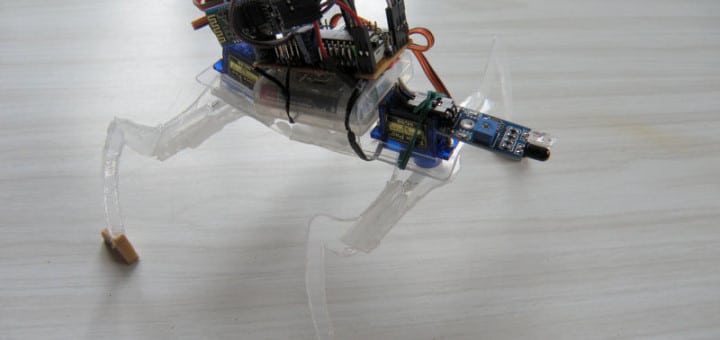
Voici le crawler, un robot à 4 pattes et 2 servos.
Il est ici piloté par un module Bluetooth, et dispose d’un capteur de proximité infra rouge.
Il est inspiré d’un modèle trouvé sur un site américain, détails et explications à venir !
Une carte Arduino custom est utilisée pour piloter les servos avec un encombrement réduit.